

2.8kg小身板,437N·m大扭矩,盘毂为机器人关节模组注入车规级标准
发布时间:2025.05.30
5月29日,全国顶尖人形机器人创新力量齐聚上海张江,共赴“2025张江人形机器人开发者大会暨创新创业大赛”,展示从核心部件到整机的前沿突破。

人形机器人面对的是一个充满变量的真实世界,轻量化、紧凑化与柔顺抗冲击的需求成为核心,对体积与重量的极致压缩,几乎是人形机器人落地路上的必答题。在这场聚焦仿生运动与智能交互的行业盛会上,盘毂作为全球轴向磁通电机领域的领先企业,以颠覆性创新、车规级的电机和电驱动技术,为人形机器人打造新一代全球领先的核心传动系统。
在同扭矩下,盘毂轴向磁通电机比普通电机的体积和自重可以减少50%以上,同时拥有更大的高效区间,展现出了突破性的应用价值和优势。

在人形机器人发展早期,“无框力矩电机+大速比谐波减速机”的驱动方案被大量应用,——谐波减速机拥有高精度、高扭矩、高刚性、高传动效率等优点,但它的工作原理也决定了其存在“柔轮周期性变形”、“易产生疲劳破坏”、“抗冲击能力弱”等缺点,影响关节模组乃至整个机器人的使用寿命;
而盘毂驱动方案采用了“轴向磁通电机+行星减速器”的设计,在体积小、重量轻、扭矩密度大的基础上,承载和抗冲击能力更强,尤其是在负载较大的下肢动力关节上,该方案能够在在提升运动效率的同时,更有效地保障机器人的运行安全。

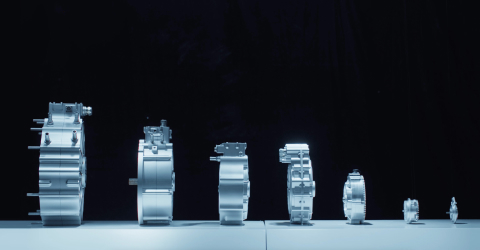
比如盘毂在本次大会上展示的PDS5K人形机器人旋转关节电驱动解决方案,“盘毂轴向磁通电机+减速器+电控”的整体自重只有2.8kg,总成尺寸仅为Φ130.9×109.3mm,对于人形机器人关节的安装空间适用性更强,让机器人关节拥有更大的运动自由度与更高的集成弹性,完美解决了人形机器人关节模组在小型化与集成度上的痛点。
尤其值得一提的是,在对体积和自重极致压缩的同时,这款解决方案依然具备强大无匹的性能:系统额定转矩和峰值转矩分别达到156N·m和437N·m,实现了轻量化与高性能的最优平衡。

基于对下一代机器人关节电机技术创新的思考,盘毂还展示了多款PCB电机产品,——通过蚀刻工艺,将定子直接“印”在板上,可以进一步压缩电机的轴向尺寸和自重,为未来人形机器人在更加复杂和严苛的场景应用提供创新思路和方案。
人形机器人技术变革与产业化拐点重合的关键节点即将到来,盘毂将以“技术服务商”的姿态,从设计、验证、开发到量产,全链路赋能各位合作伙伴,共同推动人形机器人走向真实世界,共赢未来!